Gumanoid robotlaryň çylşyrymly dünýäsinde her bir kiçijik bölek möhüm rol oýnaýar. Dolandyryjy, robotyň "beýnisi" hökmünde, tutuş ulgamyň durnuklylygy we ygtybarlylygy babatda işlemegi üçin örän möhümdir. Dolandyryjy diňe bir çylşyrymly algoritmleri we signallary işläp bilmeli däl, eýsem, ýoluň meýilnamasyny düzmek, tizligi dolandyrmak, takyk ýerleşdirmek we ş.m. ýaly robotyň hereketini we işini takyk gönükdirmeli. Dolandyryjydaky kiçijik bölekler gumanoid robot dolandyryjysynyň durnuklylygyny we ygtybarlylygyny üpjün etmek üçin esasy böleklerdir.
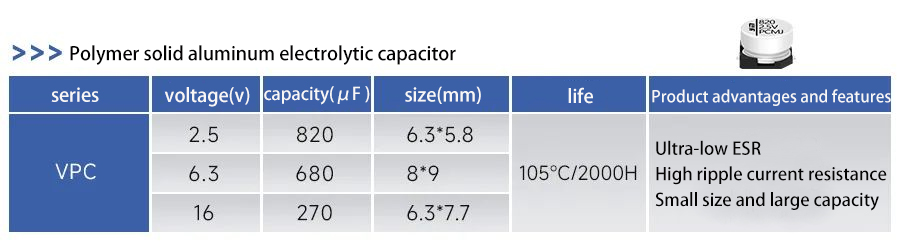
01 Ultra pes ESR
Iş wagtynda, adam şekilli robot kontrollerleri, esasanam ýokary ýygylykly we ýokary ýükli hereketleri ýerine ýetirende, ýokary tizlikli we çylşyrymly hereketleriň togunyň üýtgemelerine duçar bolarlar. Elektrik üpjünçiliginiň durnuklylygyny üpjün etmek üçin kontroller bu toguň üýtgemelerine wagtynda jogap bermelidir.
Şeýle üýtgeşiklikler bilen ýüzbe-ýüz bolanda, däp bolan kondensatorlar ýokary ESR sebäpli energiýa ýitgisine sebäp bolup, ulgamyň işine täsir edip biler.
Polimer berk alýumin elektrolitik kondensatorlaryň örän pes ESR häsiýetnamalary energiýa ýitgisini ep-esli azaldyp, kondensatorlaryň häzirki üýtgeşmelere çalt we durnukly jogap bermegine, durnukly elektrik üpjünçiligini üpjün etmegine we robot dolandyryş ulgamynyň hemişe iň gowy işini saklamagyna kepil geçip biler.
02 Ýokary tolkunly tok garşylygy
Gumanoid robotlar dürli hereketleri ýerine ýetirende, esasanam çalt işe girizende, saklananda ýa-da öwrülende, dolandyryjy derrew ýokary tok üýtgemelerini başdan geçirer. Adaty kondensatorlar aşa köp toga çydap bilmeýändigi üçin zaýalanyp, ulgamyň näsazlygyna sebäp bolup biler.
Polimer berk alýumin elektrolitik kondensatorlaryň ýokary rugsat berilýän tolkun tokunyň artykmaçlygy bar, bu bolsa robot kontrollerlerine çylşyrymly dinamiki gurşawlarda durnukly elektrik üpjünçiligini saklamaga kömek edýär. Olar kondensatoryň artykmaç ýüklenmesinden ýüze çykýan zyýanyň öňüni almak üçin uly tok üýtgemeleri ýagdaýynda çalt jogap berip we durnukly elektrik üpjünçiligini üpjün edip bilýärler.
03 Kiçi ölçegli we uly göwrümli
Robot kontrollerleri, adatça, ýeterlik kuwwatlylyk goldawyny üpjün etmek üçin ýokary kuwwatlylykly kondensatorlary çäkli giňişlikde ýüklemeli bolýarlar. Polimer berk alýumin elektrolitik kondensatorlary kiçi ölçegli we uly kuwwatlylykly häsiýetlere eýedir, bu bolsa robot kontrolleriniň dizaýn giňişligini ep-esli optimizirleýär, kiçi robotlar üçin ýeterlik kuwwatlylyk goldawyny üpjün edýär we göwrüm we agram ýükünden gaça durýar.
04 Saýlama teklibi
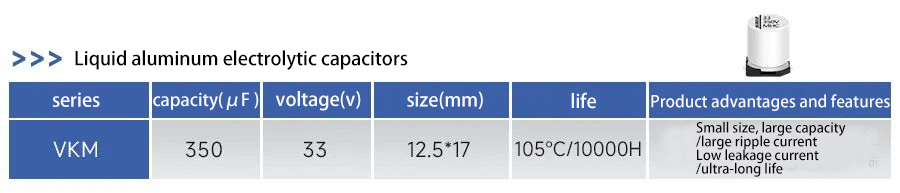
Suwuk çipli alýumin elektrolitik kondensator ergini
01 Kiçi ölçegli we uly göwrümli
Gumanoid robotlaryň giňişlik we agram babatda talaplary barha berkeýär. Suwuk çipli alýumin elektrolitik kondensatorlaryň kiçileşdirilmegi güýç modulynyň ölçegini we agramyny netijeli azaldýar. Robotyň umumy dizaýnyny optimizirlemek bilen birlikde, robotyň özüne düşýän ýükü hem azaldýar. Çalt işe girizilende ýa-da ýük üýtgeýän mahalynda, ýokary kuwwatlylyksuwuk çipli alýumin elektrolitik kondensatorlarýeterlik energiýanyň ýoklugy sebäpli dolandyryş ulgamynyň jogap beriş gijikmeleriniň ýa-da näsazlyklarynyň öňüni almak üçin ýeterlik tok gorlaryny üpjün edip biler, şeýlelik bilen robotyň dolandyryş takyklygyny we işleýiş durnuklylygyny ýokarlandyrýar.
02 Pes impedans
Suwuk çipli alýumin elektrolitik kondensatorlar elektrik zynjyrynda energiýa ýitgisini netijeli azaldyp we elektrik energiýasynyň netijeli geçirilmegini üpjün edip biler. Bu elektrik ulgamynyň jogap tizligini optimizirleýär, dolandyryjynyň hakyky wagtdaky işini we durnuklylygyny ýokarlandyrýar, şeýle hem, esasanam ýük örän üýtgeýän mahaly, çylşyrymly dolandyryş talaplaryna has gowy jogap berip biler.
03 Ýokary tolkunly tok garşylygy
Gumanoid robotlar ýokary tizlikde hereket edende we takyk dolandyranda, dolandyryjynyň elektrik üpjünçiligi köplenç uly tok tolkunlaryna duçar bolýar. Suwuk çipli alýumin elektrolitik kondensatorlar uly tok üýtgemelerine çydap, tok üýtgemeleriniň döredýän durnuksyzlygynyň öňüni alyp, dolandyryjynyň elektrik üpjünçiliginiň ýokary ýük astynda durnukly işlemegini üpjün edip, şeýlelik bilen robot ulgamynyň durnuklylygyny we ygtybarlylygyny optimizirleýär.
04 Ultra uzak ömür
Suwuk çipli alýumin elektrolitik kondensatorlarrobot kontrollerleriniň örän uzak ömürliligi bilen uzak möhletli ygtybarlylygyny üpjün edýär. 105℃ ýokary temperatura gurşawynda, ömrüniň dowamlylygy 10,000 sagada ýetip biler, bu bolsa dürli agyr iş şertlerinde kondensatorlaryň durnukly işlemegini saklap biljekdigini, tehniki hyzmat çykdajylaryny we çalşyryş ýygylygyny azaldýandygyny aňladýar.
Netije
Gumanoid robot kontrollerleriniň takyk ulgamynda kondensatorlaryň saýlanmagy robot işiniň durnuklylygy we ygtybarlylygy bilen gönüden-göni baglanyşyklydyr. ÝMIN suwuk çipli alýumin elektrolitik kondensatorlary we polimer berk alýumin elektrolitik kondensatorlary, özboluşly artykmaçlyklary bilen, robot dolandyryş ulgamlarynyň ýüzbe-ýüz bolýan kynçylyklaryny çözmek üçin esasy böleklere öwrüldi.
Bu kondensatorlar ykjam dizaýnda ýokary kuwwatly energiýa bilen üpjün etmek, uly ýük üýtgemelerinde energiýa üpjünçiliginiň durnuklylygyny üpjün etmek ýa-da ýokary ýygylykly çylşyrymly hereketlerde çalt jogap bermegi üpjün etmek bolsun, bu kondensatorlar robot kontrollerleriniň energiýa üpjünçiliginiň durnuklylygy, ygtybarlylygy we netijeli energiýa geçirijiligi üçin berk talaplaryna laýyk gelip biler.
Ýerleşdirilen wagty: 2025-nji ýylyň 5-nji marty